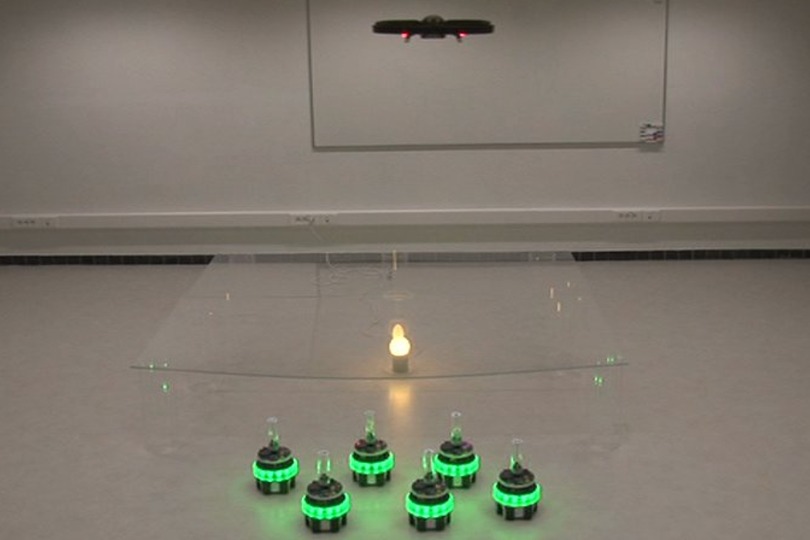
Selbst-montierende Roboter haben das Potenzial, sich einer autonomen morphologischen Anpassung zu unterziehen. Aufgrund der Einfachheit ihres Hardware-Aufbaus und ihrer begrenzten Perspektive auf die Umgebung sind sie jedoch oft nicht in der Lage, ihr volles Potenzial auszuschöpfen. Ohne externe Hinweise oder Vorinformationen sind sie möglicherweise nicht in der Lage, ihre kollektiven Roboterstrukturen (Morphologien) an Aufgaben und Umgebungen anzupassen. Unser Kollege Nithin Mathews hat zusammen mit anderen Forschern einen Forschungsartikel in der Zeitschrift «Robotics and Autonomous Systems» veröffentlicht. Sie stellen eine neuartige Kontrollmethodik namens «supervised morphogenesis» für die Kontrolle heterogener Robotergruppen vor, die sowohl bodengebundene als auch luftgestützte Roboter umfassen. Diese Steuerungsmethode ermöglicht es fliegenden Robotern, ihre erhöhte Position und ein besseres Bild der Umgebung zu nutzen, um die Formation von selbst-montierenden Robotern am Boden zu initiieren und zu kontrollieren (und damit zu überwachen). Das heißt, Luftroboter verwenden Input von Onboard-Kameras und anderen speziellen Sensoren, um zwei- oder dreidimensionale Modelle der Umgebung zu erstellen. Diese Modelle werden dann verwendet, um On-Board-Simulationen durchzuführen, die die am besten geeigneten aufgabenabhängigen (d.h. zielorientierten) Morphologien bestimmen, die am Boden gebildet werden sollen.
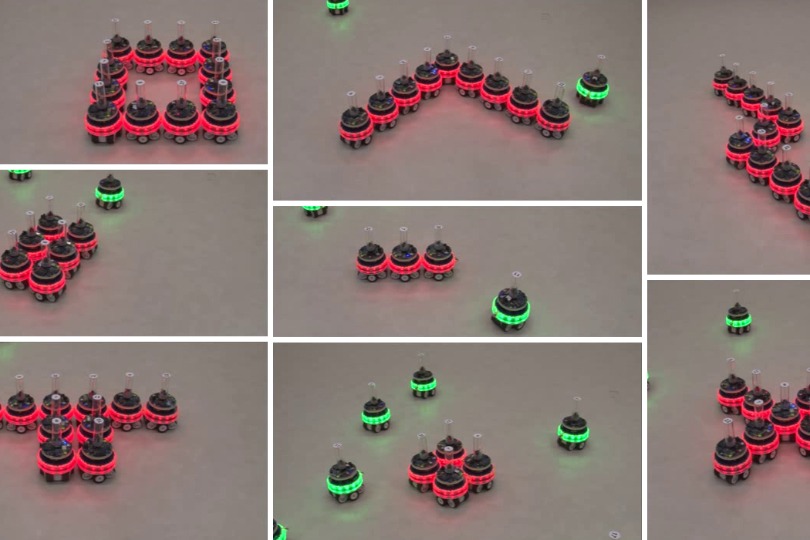
Im Forschungsartikel «Supervised morphogenesis: Exploiting morphological flexibility of self-assembly multirobot systems through cooperation with aerial robots» präsentieren Nithin und seine Kollegen aus mehreren Forschungslabors und dem Fraunhofer-Institut Ergebnisse von zwei Fallstudien mit zwei verschiedenen autonomen luftgestützten Plattformen und bis zu sechs selbst-montierende autonome Roboter. Die Forschung ist ein wichtiger Schritt, um das wahre Potenzial von selbst-montierenden Robotern zu erkennen, indem sie eine autonome morphologische Anpassung an unbekannte Aufgaben und Umgebungen ermöglicht.
Bestehende selbst-montierende Roboter sind oft von menschlichen Betreibern vorprogrammiert, die den Umfang und die Form der Zielmorphologien, die vor dem Einsatz gebildet werden sollen, genau definieren. Alternativ verlassen sich Roboter auf spezifische, umgebungsbedingte Hinweise, um Zielmorphologien abzuleiten. Dies liegt vor allem daran, dass selbst-montierende Roboter in der Regel relativ einfache Robotereinheiten sind. Es fehlt ihnen der sensorische Apparat, um die Umgebung mit ausreichender Genauigkeit zu charakterisieren, um eine geeignete Zielmorphologie für eine bestimmte Situation zu finden.